




【项目背景】
在汽车零部件仓库中,零件数量众多,要想整齐化堆叠,需要操作工人细致认真,具有一定的挑战性。并且长时间高强度的工作也会影响操作工的工作状态。上汽通用通过试点无人驾驶叉车项目作为,探索零部件仓库使用无人驾驶技术的可行性,逐步实现入厂物流的自动化、智能化水平。
【应用技术】
在上汽通用物流范围内第一次应用:
- 激光导航技术
- 无人驾驶技术
- 高精度限位装置(已申请专利)
- 高位(7m以上)前移式无人驾驶叉车
- 在线自主充电技术
【项目意义】
该项目是上汽通用物流区域第一台无人驾驶叉车设备,第一次探索使用激光导航技术,为今后其他该类型的智能物流项目的规划、实施提供了丰富的经验积累,逐步提升汽车物流行业自动化、信息化水平,让智能物流及工业4.0在上汽大放光彩。

【项目技术特性——激光导航】
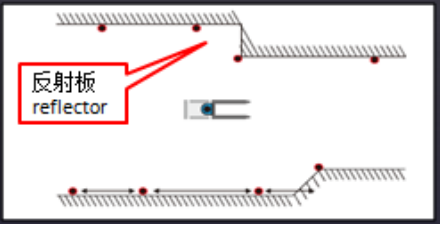
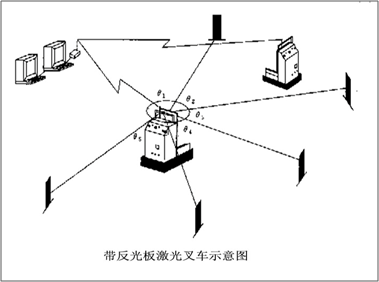
激光导航的原理是利用激光的准确性和不发散性对无人驾驶叉车所处的位置进行精确定位来指导其行走。
在无人驾驶叉车的工作场所预先安置了具有一定间隔的反射板,行进中的FLV通过车载的旋转激光头发射激光,在激光扫描一周后,照到发射板,激光原路返回,可以得到一系列发射板的反射角,经过计算,即可算得激光旋转中心的坐标。通过车载计算机计算,得到运输车所在位置,从而按规划的路径将货物送到目的地。
【项目技术特性——安全防护】
- 安全激光:安全激光扫描距离0-10m可调,扫描范围分为三个区域即安全区、缓冲区、急停区,扫描范围0 °至270 °范围内可调。当障碍物进入缓冲区域内时牵引式AGV自动降速,障碍物进入急停区时AGV立即停车,当障碍物移除后恢复正常行驶。
- 光电开关:叉卸过程中,保证叉车安全、进行正常叉卸。
- 车载警示装置:AGV车顶将搭载声光型车载警示装置,经过路口时直接以声光形式预警,以提醒行人及社会车辆注意避让。
- 远程监控:通过无线通讯系统通知AGV监控系统,在控制台上会显示当前状态和文字提示。
- 5、车身两侧各设置两个急停开关。
